




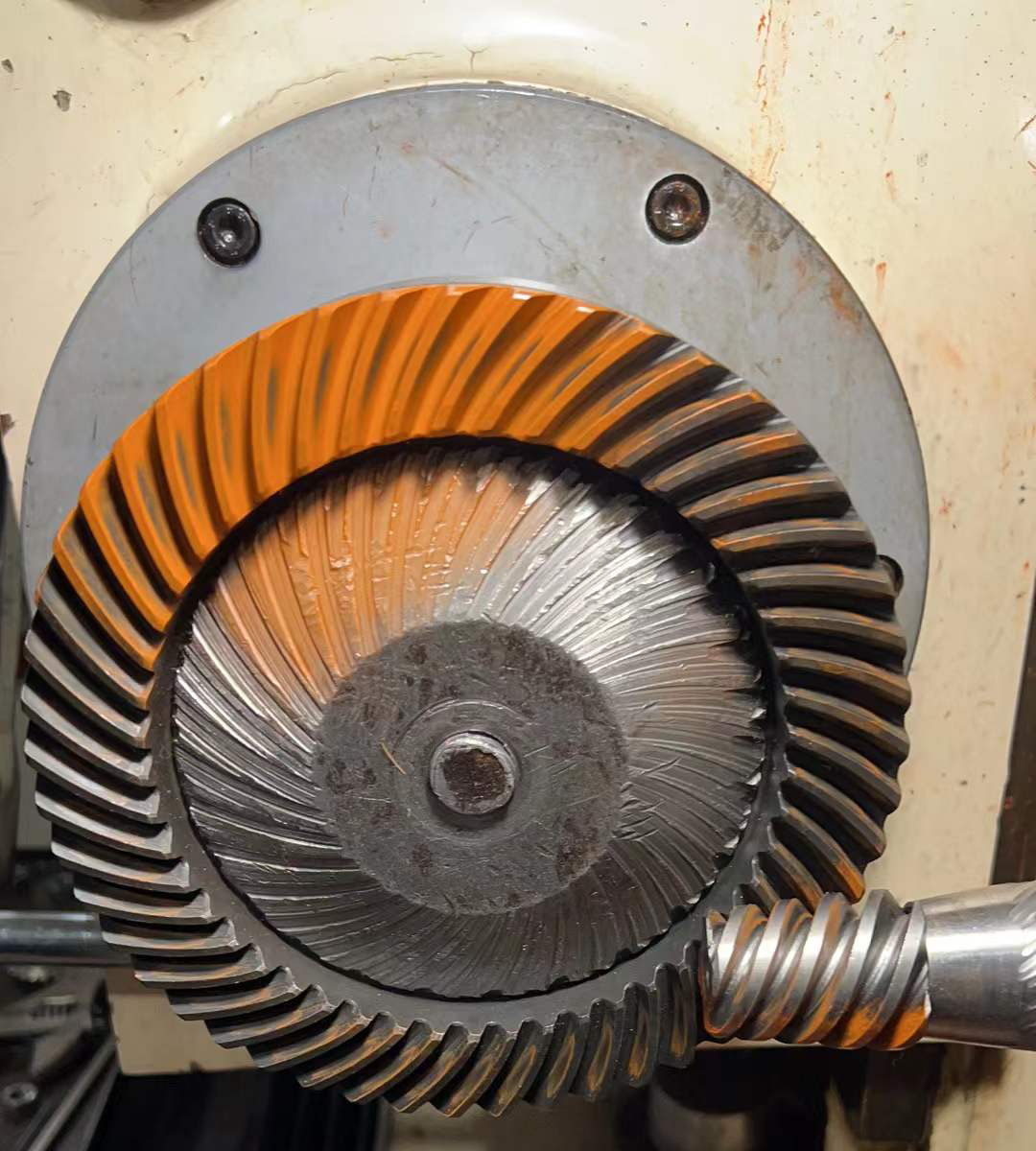
Կան ատամնանիվների բազմաթիվ տեսակներ, այդ թվում՝ ուղիղ գլանաձև ատամնանիվներ, պարուրաձև գլանաձև ատամնանիվներ, կոնաձև ատամնանիվներ և այսօր ներկայացված հիպոիդ ատամնանիվներ։
1) Հիպոիդային փոխանցումների բնութագրերը
Նախևառաջ, հիպոիդային փոխանցման լիսեռի անկյունը 90° է, և պտտող մոմենտի ուղղությունը կարող է փոխվել մինչև 90°: Սա նաև անկյան փոխակերպում է, որը հաճախ պահանջվում է ավտոմոբիլային, ինքնաթիռային կամ քամու էներգիայի արդյունաբերության մեջ: Միևնույն ժամանակ, տարբեր չափերի և տարբեր թվով ատամների ունեցող փոխանցումների զույգը միացվում է՝ պտտող մոմենտի ավելացման և արագության նվազման գործառույթը ստուգելու համար, որը սովորաբար անվանում են «պտտող մոմենտի ավելացման և արագության նվազման արագություն»: Եթե ձեր ընկերը, ով մեքենա է վարել, հատկապես մեխանիկական փոխանցման տուփով մեքենա վարելիս, բլուր բարձրանալիս, հրահանգիչը թույլ կտա ձեզ անցնել ցածր փոխանցման, ըստ էության, դա նշանակում է ընտրել համեմատաբար մեծ արագությամբ փոխանցումների զույգ, որը ապահովվում է ցածր արագությունների դեպքում: Ավելի շատ պտտող մոմենտ, այդպիսով ապահովելով ավելի մեծ հզորություն մեքենային:
Որո՞նք են հիպոիդային փոխանցումների առանձնահատկությունները:
Փոխանցման մոմենտի անկյան փոփոխությունները
Ինչպես նշվեց վերևում, պտտող մոմենտի անկյունային փոփոխությունը կարող է իրականացվել։
Կարող է դիմակայել ավելի մեծ բեռների
Քամու էներգիայի արդյունաբերության մեջ ավտոմոբիլային արդյունաբերությունը, լինի դա մարդատար մեքենաներ, ամենագնացներ, թե առևտրային տրանսպորտային միջոցներ, ինչպիսիք են բեռնատարները, բեռնատարները, ավտոբուսները և այլն, կօգտագործի այս տեսակը՝ ավելի մեծ հզորություն ապահովելու համար։
Ավելի կայուն փոխանցում, ցածր աղմուկ
Ատամների ձախ և աջ կողմերի ճնշման անկյունները կարող են անհամապատասխան լինել, և փոխանցման տուփի սահքի ուղղությունը ատամի լայնության և ատամի պրոֆիլի ուղղությամբ է, և նախագծման և տեխնոլոգիայի միջոցով կարելի է ստանալ փոխանցման տուփի ավելի լավ դիրք, որպեսզի ամբողջ փոխանցման տուփը ծանրաբեռնված լինի։ Հաջորդը դեռևս գերազանց է NVH կատարողականությամբ։
Կարգավորելի շեղման հեռավորություն
Շեղման հեռավորության տարբեր նախագծման շնորհիվ այն կարող է օգտագործվել տարբեր տարածքային նախագծման պահանջներին համապատասխանելու համար: Օրինակ, մեքենայի դեպքում այն կարող է բավարարել մեքենայի գետնից բարձրության պահանջները և բարելավել մեքենայի անցանելիությունը:
2) Հիպոիդային փոխանցումների երկու մշակման մեթոդներ
Կիսով չափ երկկողմանի ատամնանիվը ներկայացվել է Gleason Work-ի կողմից 1925 թվականին և մշակվել է երկար տարիներ։ Ներկայումս կան բազմաթիվ կենցաղային սարքավորումներ, որոնք կարող են մշակվել, բայց համեմատաբար բարձր ճշգրտության և բարձրակարգ մշակումը հիմնականում իրականացվում է արտասահմանյան Gleason և Oerlikon սարքավորումներով։ Վերջնական մշակման առումով կան ատամնանիվների հղկման և հղկման երկու հիմնական գործընթացներ, բայց ատամնանիվների կտրման գործընթացի պահանջները տարբեր են։ Ատամնանիվների հղկման գործընթացի համար խորհուրդ է տրվում օգտագործել առջևի ֆրեզ, իսկ հղկման գործընթացում՝ առջևի հոբինգ։
Դեմքի ֆրեզավորման տիպի միջոցով մշակված ատամնանիվները կոնաձև ատամներ են, իսկ դեմքի գլանման տիպի միջոցով մշակված ատամնանիվները հավասար բարձրության ատամներ են, այսինքն՝ մեծ և փոքր ծայրային երեսների ատամների բարձրությունները նույնն են։
Սովորական մշակման գործընթացը մոտավորապես նախնական տաքացումն է, ջերմային մշակումից հետո, ապա վերջնական մշակումը: Առջևի վառարանի տեսակի համար այն պետք է հղկվի և համապատասխանեցվի տաքացնելուց հետո: Ընդհանուր առմամբ, ատամնանիվների զույգը պետք է հղկվի հետագայում հավաքվելիս: Այնուամենայնիվ, տեսականորեն, ատամնանիվների հղկման տեխնոլոգիայով ատամնանիվները կարող են օգտագործվել առանց համապատասխանեցման: Այնուամենայնիվ, իրական շահագործման մեջ, հաշվի առնելով հավաքման սխալների և համակարգի դեֆորմացիայի ազդեցությունը, համապատասխանեցման ռեժիմը դեռևս օգտագործվում է:
3) Եռակի հիպոիդի նախագծումն ու մշակումն ավելի բարդ են, հատկապես շահագործման պայմաններում կամ բարձր պահանջներով բարձրակարգ արտադրանքներում, որոնք պահանջում են փոխանցման ամրություն, աղմուկ, փոխանցման արդյունավետություն, քաշ և չափսեր: Հետևաբար, նախագծման փուլում սովորաբար անհրաժեշտ է ինտեգրել բազմաթիվ գործոններ՝ իտերացիայի միջոցով հավասարակշռություն գտնելու համար: Մշակման գործընթացում սովորաբար անհրաժեշտ է նաև կարգավորել ատամի հետքը հավաքածուի թույլատրելի տատանումների սահմաններում՝ ապահովելու համար, որ իրական պայմաններում դեռևս հնարավոր լինի հասնել իդեալական կատարողականության մակարդակի՝ չափսերի շղթայի կուտակման, համակարգի դեֆորմացիայի և այլ գործոնների պատճառով:
Հրապարակման ժամանակը. Մայիսի 12-2022