




1. Ատամների քանակը Z-ն ատամների ընդհանուր քանակն էհանդերձանք
2, մոդուլ m։ Ատամների հեռավորության և ատամների քանակի արտադրյալը հավասար է բաժանարար շրջանագծին, այսինքն՝ pz= πd,
որտեղ z-ը բնական թիվ է, իսկ π-ն՝ իռացիոնալ թիվ։ Որպեսզի d-ն լինի ռացիոնալ, պայմանը, որ p/π-ն ռացիոնալ է, կոչվում է մոդուլ։ Այսինքն՝ m=p/π
3, ինդեքսավորող շրջանի տրամագիծը d և ատամնանիվի ատամի չափը որոշվում են այս շրջանի d=mz պատճենի ամբողջական տեքստի հիման վրա 24, վերին շրջանի տրամագիծը d: Եվ արմատային շրջանի տրամագիծը de լիաէկրան ընթերցմամբ՝ կատարի բարձրության և արմատի բարձրության հաշվարկման բանաձևից, կատարի շրջանի տրամագծի և արմատային շրջանի տրամագծի հաշվարկման բանաձևը կարելի է ստանալ՝
d.=d+2h.=mz+2m=m(z+2)
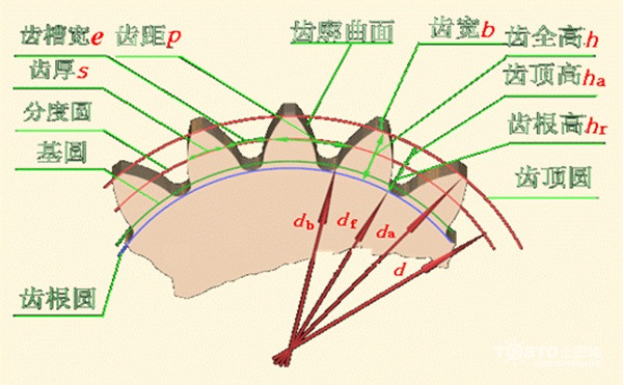
Որքան մեծ է անիվի մոդուլը, այնքան բարձր և հաստ են ատամները, եթե ատամների քանակը
մեխանիզմԱնկասկած, այնքան մեծ է անիվի շառավղային չափը։ Մոդուլային շարքի ստանդարտները ձևակերպվում են նախագծման, արտադրության և ստուգման պահանջներին համապատասխան։ Ոչ ուղիղ ատամներով ատամնանիվների համար մոդուլը տարբերություն ունի նորմալ մոդուլի mn-ի, ծայրային մոդուլի ms-ի և առանցքային մոդուլի mx-ի միջև, որոնք հիմնված են դրանց համապատասխան քայլի (նորմալ քայլ, ծայրային քայլ և առանցքային քայլ) և PI-ի հարաբերակցության վրա և նույնպես միլիմետրերով են։ Կոնաձև ատամնանիվի համար մոդուլն ունի մեծ ծայրային մոդուլ me, միջին մոդուլ mm և փոքր ծայրային մոդուլ m1։ Գործիքի համար կա համապատասխան գործիքային մոդուլ mo և այլն։ Ստանդարտ մոդուլները լայնորեն օգտագործվում են։ Մետրիկական ատամնանիվների փոխանցման, որդավոր փոխանցման, սինխրոն ատամնանիվների գոտիային փոխանցման և ճախարակի, ատամնանիվների միացման, սպլայնի և այլ մասերում ստանդարտ մոդուլը ամենակարևոր պարամետրն է։ Այն հիմնական պարամետրային դեր է խաղում վերը նշված մասերի նախագծման, արտադրության և սպասարկման մեջ։
1) Մոդուլը ցույց է տալիս ատամների չափը։ R-մոդուլը բաժանարար շրջանագծի քայլի և PI (π) կետի հարաբերակցությունն է, որը արտահայտվում է միլիմետրերով (մմ)։ Մոդուլներից բացի, ատամների չափը նկարագրելու համար ունենք նաև տրամագծային քայլ (CP) և DP (տրամագծային քայլ)։ Տրամագծի քայլը երկու հարակից ատամների վրա համարժեք կետերի միջև ընկած բաժանարար աղեղի երկարությունն է։
2) Ի՞նչ է «ցուցիչ շրջանագծի տրամագիծը»։ Ցուցիչ շրջանագծի տրամագիծը հաշվարկային տրամագիծն է։մեխանիզմ. Ատամնաշարի չափը որոշող երկու հիմնական գործոններն են մոդուլը և ատամների քանակը, իսկ բաժանարար շրջանի տրամագիծը հավասար է ատամների քանակի և մոդուլի (վերջնական մակերեսի) արտադրյալին։
3) Ի՞նչ է «ճնշման անկյունը»։ Ատամի ձևի հատման կետում ճառագայթային գծի և կետի ատամի ձևի շոշափողի միջև ընկած սուր անկյունը կոչվում է հղման շրջանագծի ճնշման անկյուն։ Ընդհանուր առմամբ, ճնշման անկյունը վերաբերում է ինդեքսավորող շրջանագծի ճնշման անկյանը։ Առավել հաճախ օգտագործվող ճնշման անկյունը 20°-ն է, սակայն օգտագործվում են նաև 14.5°, 15°, 17.5° և 22.5° ճնշման անկյուններով ատամնանիվներ։
4) Ի՞նչ տարբերություն կա միագլուխ և երկգլուխ որդերի միջև։ Որդի պարուրաձև ատամների քանակը կոչվում է «գլուխների քանակ», որը համարժեք է ատամնանիվի ատամների քանակին։ Որքան շատ գլխիկներ կան, այնքան մեծ է կապարի անկյունը։
5) Ինչպե՞ս տարբերակել R-ը (աջլիկ): L-ը (ձախլիկ): Փոխանցման լիսեռը ուղղահայաց, հարթ, ատամնանիվի աջ թեքությունը աջ ատամնանիվն է, իսկ ձախ թեքությունը՝ ձախ ատամնանիվը:
6) Ի՞նչ տարբերություն կա M (մոդուլ) և CP (քայլ) միջև։ CP (շրջանաձև քայլ)-ը ցուցիչ շրջանագծի ատամների շրջանաձև քայլն է։ Միավորը նույնն է, ինչ մոդուլը միլիմետրերով։ CP-ն PI (π)-ի վրա բաժանելիս ստացվում է M (մոդուլ)։ M (մոդուլ)-ի և CP-ի միջև եղած կապը ներկայացված է հետևյալ կերպ։ M (մոդուլ) =CP/π (PI) Երկուսն էլ ատամի չափի միավորներ են։ (Բաժանարար շրջագիծը = nd=zpd=zp/ l/PI կոչվում է մոդուլ)

7) Ի՞նչ է «հակադարձ հարվածը»։ Ատամնաշարի զույգի ատամների մակերևույթների միջև եղած բացը, երբ դրանք միացված են։ Հակադարձ հարվածը անհրաժեշտ պարամետր է ատամնանիվների միացման սահուն աշխատանքի համար։ 8) Ի՞նչ տարբերություն կա ծռման ամրության և ատամների մակերևույթի ամրության միջև։ Ընդհանուր առմամբ, ատամնանիվների ամրությունը պետք է դիտարկել երկու տեսանկյունից՝ ծռում և ատամների մակերևույթի ամրություն։ Ծռման ամրությունը ատամի այն ամրությունն է, որը փոխանցում է ուժ՝ ատամի արմատում կոտրվելուն դիմադրելու համար՝ ծռման ուժի ազդեցության պատճառով։ Ատամների մակերևույթի ամրությունը ատամի մակերևույթի շփման ամրությունն է ցանցի մեջ գտնվող ատամի կրկնակի շփման ժամանակ։ 9) Ծռման ամրության և ատամի մակերևույթի ամրության մեջ ի՞նչ ամրություն է օգտագործվում որպես ատամնանիվ ընտրելու հիմք։ Ընդհանուր առմամբ, պետք է քննարկվեն և՛ ծռումը, և՛ ատամների մակերևույթի ամրությունը։ Այնուամենայնիվ, ավելի քիչ օգտագործվող ատամնանիվներ, ձեռքի ատամնանիվներ և ցածր արագությամբ միացման ատամնանիվներ ընտրելիս կան դեպքեր, երբ ընտրվում է միայն ծռման ամրությունը։ Վերջնական որոշումը կայացնում է նախագծողը։
Հրապարակման ժամանակը. Հոկտեմբերի 31-2024