




Ավտոմոբիլային վերջնական ռեդուկտորներում օգտագործվող հիմնական փոխանցման մեթոդները պարուրաձև կոնաձև ատամնանիվներն ու հիպոիդ կոնաձև ատամնանիվներն են: Ի՞նչ տարբերություն կա դրանց միջև:
Հիպոիդային կոնաձև ատամնանիվի և պարուրաձև կոնաձև ատամնանիվի միջև տարբերությունը
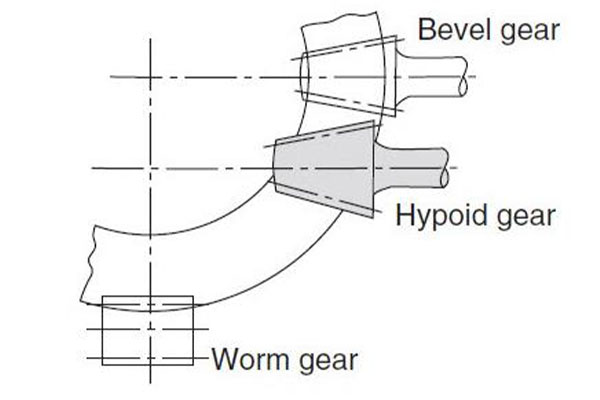
Սպիրալաձև կոնաձև ատամնանիվ, շարժիչի և շարժիչի ատամնանիվների առանցքները հատվում են մեկ կետում, և հատման անկյունը կարող է լինել կամայական, բայց ավտոմեքենաների շարժիչի առանցքների մեծ մասում գլխավոր ռեդուկտորի ատամնանիվների զույգը դասավորված է ուղղահայաց՝ 90° անկյան տակ։ Ատամների ատամների ծայրային մակերևույթների համընկնման պատճառով, ատամնանիվների առնվազն երկու կամ ավելի զույգեր միաժամանակ միանում են։ Հետևաբար, պարուրաձև կոնաձև ատամնանիվը կարող է դիմակայել ավելի մեծ բեռի։ Բացի այդ, ատամնանիվների ատամները չեն միանում միաժամանակ ամբողջ ատամի երկարությամբ, այլ աստիճանաբար միանում են ատամներով։ Մի ծայրը անընդհատ պտտվում է մյուս ծայրին, որպեսզի այն սահուն աշխատի, և նույնիսկ բարձր արագության դեպքում աղմուկն ու թրթռումը շատ փոքր են։
Սպիրալաձև կոնաձև ատամնանիվները կոնաձև ատամնանիվների տեսակ են՝ կոր, պարուրաձև ատամներով: Հաճախ օգտագործվող տրանսպորտային միջոցների դիֆերենցիալներում, դրանք արդյունավետորեն փոխանցում են պտտող մոմենտը 90 աստիճանի անկյան տակ փոխանցման լիսեռից անիվներին: Ուղիղ կոնաձև ատամնանիվների համեմատ, դրանց պարուրաձև ատամնավոր դիզայնը ապահովում է ավելի հարթ միացում, նվազեցված թրթռում և ավելի անաղմուկ աշխատանք, ինչը դրանք իդեալական է դարձնում բարձր արդյունավետությամբ ավտոմոբիլային և արդյունաբերական կիրառությունների համար:
1. «Աջ» և «ձախ» տերմինները հետևողականորեն օգտագործվում են նաև պարուրաձև կոնաձև ատամնանիվների, հիպոիդ ատամնանիվների և թեք ատամնավոր ատամնանիվների մեջ:
2. Այլ տեսակի ատամնանիվների նման, պարուրաձև կոնաձև ատամնանիվները, հիպոիդ ատամնանիվները և անկյունային ատամներով առջևի ատամնանիվները դասակարգվում են որպես աջ կամ ձախ՝ կախված իրենց պարույրի ուղղությունից:
3. Աջ և ձախ դասակարգումները սովորաբար կիրառվում են կոնաձև ատամնանիվների, հիպոիդ ատամնանիվների և թեք ատամնավոր երկրաչափություն ունեցող առջևի ատամնանիվների համար:
4. Ինչպես մյուս թեք ատամնավոր ատամնանիվները, պարուրաձև կոնաձև և հիպոիդ ատամնանիվները նույնպես տարբերվում են աջ կամ ձախ նշանակմամբ՝ կախված ատամների կողմնորոշումից:
5. Աջ և ձախ ատամնանիվների տերմինաբանության մեջ աջ և ձախ ատամնանիվների նշանակումները միատեսակ են կիրառվում պարուրաձև կոնաձև ատամնանիվների, հիպոիդ ատամնանիվների և անկյունային ատամնանիվների համար:
Հիպոիդային փոխանցումներ, շարժիչ և շարժիչ ատամնանիվների առանցքները չեն հատվում, այլ հատվում են տարածության մեջ։ Հիպոիդ ատամնանիվների հատման անկյունները հիմնականում ուղղահայաց են տարբեր հարթություններին 90° անկյան տակ։ Շարժիչ ատամնանիվների լիսեռը ունի վերև կամ ներքև շեղում շարժիչ ատամնանիվների լիսեռի նկատմամբ (համապատասխանաբար կոչվում է վերին կամ ստորին շեղում)։ Երբ շեղումը որոշակի չափով մեծ է, մեկ շարժիչի լիսեռը կարող է անցնել մյուս շարժիչի լիսեռի կողքով։ Այսպիսով, յուրաքանչյուր շարժիչի երկու կողմերում կարող են տեղադրվել կոմպակտ կրողներ, ինչը օգտակար է հենարանի կոշտությունը բարձրացնելու և ատամնանիվների ատամների ճիշտ միացումն ապահովելու համար, այդպիսով մեծացնելով ատամնանիվների կյանքը։ Այն հարմար է միջանցիկ տիպի շարժիչ առանցքների համար։

Չի համապատասխանումպարուրաձև կոնաձև ատամնանիվներ Երբ շարժիչ և շարժիչ ատամնանիվների պարուրաձև անկյունները հավասար են, քանի որ ատամնանիվների զույգերի առանցքները հատվում են, հիպոիդային ատամնանիվների զույգի առանցքի շեղումը շարժիչ ատամնանիվների պարուրաձև անկյունը դարձնում է ավելի մեծ, քան շարժիչ ատամնանիվների պարուրաձև անկյունը։ Հետևաբար, չնայած հիպոիդային կոնաձև ատամնանիվների զույգի նորմալ մոդուլը հավասար է, ծայրային մակերեսի մոդուլը հավասար չէ (շարժիչ ատամնանիվների ծայրային մակերեսի մոդուլը մեծ է շարժիչ ատամնանիվների ծայրային մակերեսի մոդուլից)։ Սա կիսաերկկողմանի կոնաձև ատամնանիվների փոխանցման մեխանիզմին դարձնում է ավելի մեծ տրամագիծ և ավելի լավ ամրություն ու կոշտություն, քան համապատասխան պարուրաձև կոնաձև ատամնանիվների փոխանցման մեխանիզմին։ Բացի այդ, հիպոիդային կոնաձև ատամնանիվների փոխանցման մեխանիզմի շարժիչ ատամնանիվների մեծ տրամագծի և պարուրաձև անկյան պատճառով նվազում է ատամի մակերեսի վրա շփման լարվածությունը, և երկարանում է ծառայության ժամկետը։
Պատվերով պատրաստված սարքավորումներ Բելոն ԳիրԱրտադրող
Սակայն, երբ փոխանցման տուփը համեմատաբար փոքր է, կիսաերկկողմանի կոնաձև փոխանցման տուփի շարժիչ մեխանիզմը չափազանց մեծ է պարուրաձև կոնաձև փոխանցման տուփի շարժիչ մեխանիզմի համեմատ։ Այս պահին ավելի խելամիտ է ընտրել պարուրաձև կոնաձև փոխանցման տուփը։
Հրապարակման ժամանակը. Մարտ-11-2022