




Փոխանցման հարաբերակցությունները կարևոր դեր են խաղում տարբեր մեխանիկական համակարգերի գործունեության մեջ՝ հեծանիվներից մինչև ավտոմեքենաներ և արդյունաբերական մեքենաներ: Փոխանցման հարաբերակցությունների աշխատանքի հասկացողությունը հիմնարար նշանակություն ունի հզորության արդյունավետ փոխանցման մեխանիզմները գնահատելու համար:
Ի՞նչ են փոխանցման հարաբերակցությունները։
Փոխանցման հարաբերակցությունները երկու կամ ավելի փոխկապակցված փոխանցումների պտտման արագությունների միջև եղած կապը նկարագրելու միջոց են։ Դրանք որոշում են այն արագությունը և պտտող մոմենտը, որով հզորությունը փոխանցվում է պտտվող բաղադրիչների միջև։ Ըստ էության, փոխանցման հարաբերակցությունները սահմանում են, թե քանի անգամ պետք է պտտվի փոխանցման փոխանցումը, որպեսզի այն կատարի ամբողջական պտույտ։
Փոխանցման հարաբերակցությունների հաշվարկ.
Փոխանցման հարաբերակցությունները հաշվարկվում են յուրաքանչյուր փոխանցման ատամների քանակը համեմատելով։մեխանիզմԱվելի շատ ատամներ ունեցող ատամնանիվը կոչվում է փոխանցող ատամնանիվ կամ մուտքային ատամնանիվ, մինչդեռ ավելի քիչ ատամներ ունեցողը՝ փոխանցող ատամնանիվ կամ ելքային ատամնանիվ։ Հարաբերակցությունը որոշվում է՝ փոխանցող ատամնանվի ատամների քանակը բաժանելով փոխանցվող ատամնանվի ատամների քանակի վրա։
կարդալ ավելինփոխանցման տուփերի տեսակներըԲելոնի սարքավորումներ
TheGears-ի կիրառումը Տարբեր ոլորտներում
Մոլորակային փոխանցումների բազմակողմանիությունն ու արդյունավետությունը դրանք անփոխարինելի են դարձրել տարբեր կարևորագույն ոլորտներում.
Էլեկտրական գործիքների փոխանցումներ՝ Մոլորակային մեխանիզմՀամակարգերը հիմնարար նշանակություն ունեն էլեկտրական գործիքների փոխանցման տուփերի համար՝ առաջարկելով փոխանցման հարաբերակցությունների լայն տեսականի և արդյունավետ հզորության փոխանցում կոմպակտ դիզայնով։
Ավիատիեզերական մեխանիզմներ.Իրենց բարձր հզորության և քաշի հարաբերակցության շնորհիվ, մոլորակային փոխանցումները համապատասխանում են ավիատիեզերական արդյունաբերության պահանջկոտ չափանիշներին թեթև և բարձր արդյունավետությամբ բաղադրիչների համար։
Ռոբոտային փոխանցումներ.Պլանետարային փոխանցումների կոմպակտ դիզայնը կատարյալ է ռոբոտաշինության համար, նվազագույնի հասցնելով երկարացված փոխանցումային շարքերի անհրաժեշտությունը՝ միաժամանակ հասնելով զգալի կրճատումների։
3D տպիչով տպված ատամնանիվներ՝Թեև տարբեր մեխանիզմներ կարող են տպագրվել 3D տպագրությամբ, Accu-ում մենք մշակել ենք նախագծեր՝ օգտագործելով 3D տպագրված մոլորակային մեխանիզմներ՝ սուրճի մրուրը արդյունավետորեն բաշխելու համար։
Օրինակ, եթե փոխանցման մեխանիզմն ունի 30 ատամ, իսկ փոխանցման մեխանիզմը՝ 10 ատամ, ապա փոխանցման հարաբերակցությունը կլինի 75:25 կամ պարզապես 3:1: Սա նշանակում է, որ փոխանցման մեխանիզմի յուրաքանչյուր երեք պտույտի համար փոխանցման մեխանիզմը կատարում է մեկ պտույտ:
Փոխանցման հարաբերակցություն և արագություն՝
Փոխանցման հարաբերակցությունները ոչ միայն ազդում են պտտող մոմենտի, այլև պտտման արագության վրա: Բազմափոխանցումային համակարգում յուրաքանչյուր փոխանցում ունի իր սեփական փոխանցման հարաբերակցությունը, և համակցված ազդեցությունը որոշում է համակարգի ընդհանուր փոխանցման հարաբերակցությունը:
Երբ փոխանցման մեխանիզմն ունի ավելի մեծ թվով ատամներ, քան փոխանցման մեխանիզմը, դա հանգեցնում է ավելի բարձր փոխանցման հարաբերակցության: Ավելի բարձր փոխանցման հարաբերակցությունը նշանակում է, որ փոխանցման մեխանիզմը կպտտվի ավելի դանդաղ արագությամբ, քան փոխանցման մեխանիզմը, բայց ավելի մեծ պտտող մոմենտով: Սա օգտակար է այն դեպքերում, երբ պահանջվում է ավելի մեծ ուժ, ինչպիսիք են զառիթափ բլուրներ բարձրանալը կամ ծանր բեռներ քարշ տալը:
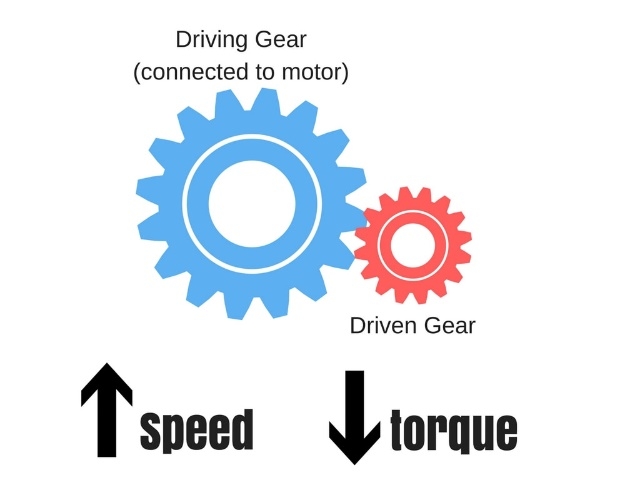
Մյուս կողմից, եթե փոխանցման մեխանիզմն ավելի շատ ատամներ ունի, քան փոխանցման մեխանիզմը, դա ստեղծում է ավելի ցածր փոխանցման հարաբերակցություն։ Այս դեպքում փոխանցման մեխանիզմն ավելի արագ է պտտվում, քան փոխանցման մեխանիզմը, բայց ավելի քիչ պտտող մոմենտով։ Ավելի ցածր փոխանցման հարաբերակցությունները հարմար են այն կիրառությունների համար, որոնք պահանջում են ավելի բարձր արագություններ, օրինակ՝ ուղիղ ճանապարհով բարձր արագությունների հասնելը։
Փոխանցման հարաբերակցությունները անթիվ կիրառություններում արդյունավետ հզորության փոխանցման հետևում կանգնած մեխանիկական կախարդներն են։ Weկարող է կարգավորել պտտման արագությունը և պտտող մոմենտը՝ համապատասխանեցնելով կոնկրետ կարիքներին՝ կարգավորելով ատամնանիվների ատամների քանակը։
Հրապարակման ժամանակը. Հունիս-28-2023