




Գլիսոնպարուրաձև կոնաձև ատամնանիվներԳլիսոնի համակարգը մասնագիտացված տեսակի կոնաձև ատամնանիվ է, որը նախատեսված է հատվող առանցքների միջև հզորությունը փոխանցելու համար, սովորաբար 90 աստիճանի անկյան տակ: Գլիսոնի համակարգը տարբերակող է իր յուրահատուկ ատամնային երկրաչափությամբ և արտադրական մեթոդով, որոնք ապահովում են հարթ շարժում, բարձր պտտող մոմենտ և անաղմուկ աշխատանք: Այս ատամնանիվները լայնորեն կիրառվում են ավտոմոբիլային, արդյունաբերական և ավիատիեզերական փոխանցման տուփերում, որտեղ հուսալիությունն ու ճշգրտությունը կարևոր են:
Գլիսոնի համակարգը մշակվել է ուղիղ ևզրոյական կոնաձև ատամնանիվներներդնելով կոր, պարուրաձև ատամ։ Այս պարուրաձև ձևը հնարավորություն է տալիս աստիճանաբար միանալ ատամներին՝ զգալիորեն նվազեցնելով աղմուկը և թրթռումը, միաժամանակ թույլ տալով ավելի բարձր պտտման արագություններ և բեռնունակություն։ Դիզայնը նաև բարելավում է շփման հարաբերակցությունը և մակերեսի ամրությունը՝ ապահովելով հզորության արդյունավետ փոխանցում ծանր կամ դինամիկ բեռների դեպքում։
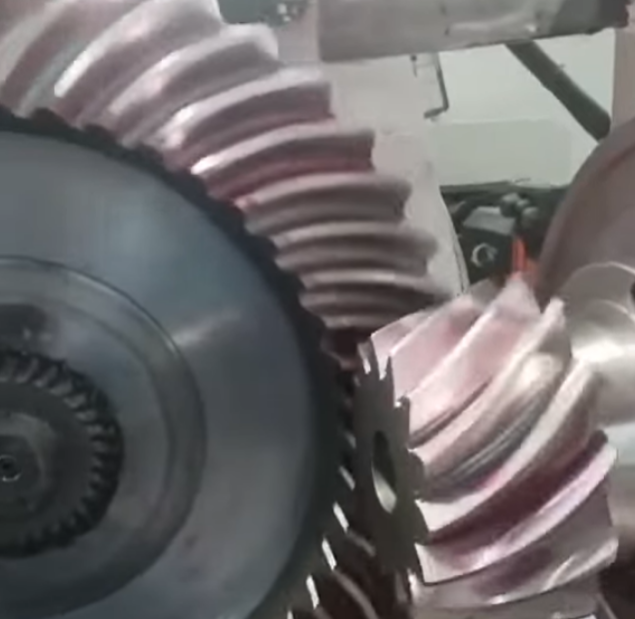
Գլիսոնի պարուրաձև կոնաձև ատամնանիվների յուրաքանչյուր զույգ բաղկացած է պինիոնից և զուգակցվող ատամնանիվից, որոնք արտադրվում են համապատասխան երկրաչափությամբ: Արտադրական գործընթացը խիստ մասնագիտացված է: Այն սկսվում է համաձուլված պողպատե նախշերի, օրինակ՝ 18CrNiMo7-6-ի, կռումից կամ ճշգրիտ ձուլումից, որին հաջորդում է կոպիտ կտրումը, հղկումը կամ ձևավորումը՝ ատամնանիվների սկզբնական ձևը ստանալու համար: 5-առանցքային մեքենայացման, ողորկման և կոշտ կտրման նման առաջադեմ մեթոդները ապահովում են բարձր չափսերի ճշգրտություն և օպտիմալացված մակերեսային մշակում: Ջերմային մշակումից, ինչպիսին է կարբուրացումը (58–60 HRC), ատամնանիվները ենթարկվում են հղկման կամ հղկման՝ ատամնանիվների և ատամնանիվների միջև կատարյալ միաձուլում ապահովելու համար:
Գլիսոնի պարուրաձև կոնաձև ատամնանիվների երկրաչափությունը սահմանվում է մի քանի կարևոր պարամետրերով՝ պարուրաձև անկյուն, ճնշման անկյուն, կոնաձև թեքության հեռավորություն և ճակատային լայնություն: Այս պարամետրերը ճշգրիտ հաշվարկվում են՝ ատամների ճիշտ շփման օրինաչափությունները և բեռի բաշխումն ապահովելու համար: Վերջնական ստուգման ընթացքում կոորդինատային չափման մեքենայի (CMM) և ատամների շփման վերլուծության (TCA) նման գործիքները ստուգում են, որ ատամնանիվների հավաքածուն համապատասխանում է պահանջվող DIN 6 կամ ISO 1328-1 ճշգրտության դասին:

Գործողության մեջ, Գլիսոնի պարույրկոնաձև ատամնանիվներԱռաջարկում են բարձր արդյունավետություն և կայուն աշխատանք նույնիսկ պահանջկոտ պայմաններում: Կոր ատամները ապահովում են անընդհատ շփում՝ նվազեցնելով լարվածության կենտրոնացումը և մաշվածությունը: Սա դրանք դարձնում է իդեալական ավտոմեքենաների դիֆերենցիալների, բեռնատարների փոխանցման տուփերի, ծանր տեխնիկայի, ծովային շարժիչային համակարգերի և էլեկտրական գործիքների համար: Բացի այդ, ատամների երկրաչափությունը և տեղադրման հեռավորությունը հարմարեցնելու հնարավորությունը թույլ է տալիս ինժեներներին օպտիմալացնել դիզայնը՝ հաշվի առնելով որոշակի պտտող մոմենտի, արագության և տարածության սահմանափակումները:
Գլիսոնի տիպի պարուրաձև կոնաձև ատամնանիվ — հաշվարկման աղյուսակ
| Ապրանք | Ֆորմուլա / Արտահայտություն | Փոփոխականներ / Նշումներ |
|---|---|---|
| Մուտքագրման պարամետրեր | (z_1,\ z_2,\ m_n,\ \ալֆա_n,\ \Սիգմա,\ b,\ T) | պինիոնի/մեխանիզմի ատամներ (z); նորմալ մոդուլ (m_n); նորմալ ճնշման անկյուն (\alpha_n); լիսեռի անկյուն (\Sigma); ճակատային լայնություն (b); փոխանցվող մոմենտ (T): |
| Հղման (միջին) տրամագիծ | (d_i = z_i, m_n) | i = 1 (փինիոն), 2 (ատամնաշար): Միջին/հղման տրամագիծը նորմալ հատվածում: |
| Թեքության (կոնային) անկյուններ | (\delta_1,\ \delta_2) այնպես, որ (\delta_1+\delta_2=\Sigma) և (\dfrac{\sin\delta_1}{d_1}=\dfrac{\sin\delta_2}{d_2}) | Լուծեք կոնի անկյունները, որոնք համապատասխանում են ատամների համամասնություններին և լիսեռի անկյանը։ |
| Կոնի հեռավորությունը (գլխի թեքության հեռավորությունը) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\sin\delta_2}) | Կոնի գագաթից մինչև թեք շրջանակը չափված հեռավորությունը՝ գեներատորիքսի երկայնքով։ |
| Շրջանաձև քայլ (նորմալ) | (p_n = \pi m_n) | Գծային թեքություն նորմալ հատվածում։ |
| Լայնակի մոդուլ (մոտավորապես) | (m_t = \dfrac{m_n}{\cos\beta_n}) | (\beta_n) = նորմալ պարուրաձև անկյուն; անհրաժեշտության դեպքում փոխակերպվում է նորմալ և լայնակի հատույթների միջև։ |
| Սպիրալային անկյուն (միջին/լայնակի հարաբերակցություն) | (\tan\beta_t = \tan\beta_n \cos\delta_m) | (\delta_m) = միջին կոնի անկյունը; օգտագործվում են նորմալ, լայնակի և միջին պարուրաձև անկյունների միջև փոխակերպումները։ |
| Դեմքի լայնության խորհուրդ | (բ = կ_բ, մ_ն) | (k_b) սովորաբար ընտրվում է 8-ից մինչև 20՝ կախված չափից և կիրառությունից։ Ճշգրիտ արժեքի համար դիմեք նախագծման մասնագետներին։ |
| Հավելված (միջին) | (մոտավորապես m_n) | Ստանդարտ լրիվ խորության հավելվածի մոտավոր հաշվարկ; ճշգրիտ արժեքների համար օգտագործեք ատամների ճշգրիտ համամասնությունների աղյուսակներ: |
| Արտաքին (ծայրի) տրամագիծը | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Արմատի տրամագիծը | (d_{f,i} = d_i – 2ժ_ֆ) | (h_f) = dedendum (փոխանցման համակարգի համամասնություններից): |
| Շրջանաձև ատամի հաստությունը (մոտավորապես) | (s \մոտավորապես \dfrac{\pi m_n}{2}) | Անկյունային երկրաչափության համար ճշգրտության համար օգտագործեք ատամների աղյուսակներից շտկված հաստությունը։ |
| Շոշափող ուժը քայլի շրջանագծի վրա | (F_t = \dfrac{2T}{d_p}) | (T) = պտտող մոմենտ; (d_p) = քայլի տրամագիծ (օգտագործեք հետևողական միավորներ): |
| Ծռման լարվածություն (պարզեցված) | (\sigma_b = \dfrac{F_t \cdot K_O \cdot K_V}{b \cdot m_n \cdot Y}) | (K_O) = գերծանրաբեռնվածության գործակից, (K_V) = դինամիկ գործակից, (Y) = ձևի գործակից (ծռման երկրաչափություն): Նախագծման համար օգտագործեք AGMA/ISO ծռման ամբողջական հավասարումը: |
| Շփման լարվածություն (Հերցի տիպի, պարզեցված) | (\sigma_H = C_H \sqrt{\dfrac{F_t}{d_p , b} \cdot \dfrac{1}{\frac{1-\nu_1^2}{E_1}+\frac{1-\nu_2^2}{E_2}}}) | (C_H) երկրաչափական հաստատուն, (E_i,\nu_i) նյութի առաձգականության մոդուլներ և Պուասոնի հարաբերակցություններ։ Ստուգման համար օգտագործեք ամբողջական շփման-լարման հավասարումները։ |
| Շփման հարաբերակցություն (ընդհանուր) | (\varepsilon = \dfrac{\text{գործողության աղեղ}}{\text{հիմնական տոնայնություն}}) | Կոնաձև ատամնանիվների համար հաշվարկը կատարվում է քայլի կոնաձև երկրաչափության և պարուրաձև անկյան միջոցով։ Սովորաբար գնահատվում է ատամնանիվների նախագծման աղյուսակների կամ ծրագրային ապահովման միջոցով։ |
| Ատամների վիրտուալ քանակը | (z_v \մոտավորապես \dfrac{d}{m_t}) | Օգտակար է շփման/կտրվածքի ստուգումների համար; (m_t) = լայնակի մոդուլ։ |
| Նվազագույն ատամների / կտրվածքի ստուգում | Օգտագործեք ատամների նվազագույն վիճակը՝ հիմնվելով պարուրաձև անկյան, ճնշման անկյան և ատամների համամասնությունների վրա | Եթե (z)-ը նվազագույնից ցածր է, ապա անհրաժեշտ է կտրվածք կամ հատուկ գործիքավորում։ |
| Մեքենայի/կտրիչի կարգավորումներ (նախագծման քայլ) | Որոշեք կտրիչի գլխիկի անկյունները, օրորոցի պտույտը և ինդեքսավորումը փոխանցման համակարգի երկրաչափությունից | Այս կարգավորումները ստացվում են ատամնանիվների երկրաչափությունից և կտրիչների համակարգից։ Հետևեք մեքենայի/գործիքային մշակման ընթացակարգին։ |
Ժամանակակից արտադրական տեխնոլոգիաները, ինչպիսիք են CNC կոնաձև ատամնանիվ կտրող և հղկող մեքենաները, ապահովում են կայուն որակ և փոխարինելիություն: Համակարգչային օժանդակ նախագծման (CAD) և սիմուլյացիայի ինտեգրման միջոցով արտադրողները կարող են իրականացնել հակադարձ ինժեներիա և վիրտուալ փորձարկումներ իրական արտադրությունից առաջ: Սա նվազագույնի է հասցնում արտադրության ժամկետներն ու ծախսերը՝ միաժամանակ բարելավելով ճշգրտությունն ու հուսալիությունը:

Ամփոփելով՝ Gleason-ի պարուրաձև կոնաձև ատամնանիվները ներկայացնում են առաջադեմ երկրաչափության, նյութի ամրության և արտադրական ճշգրտության կատարյալ համադրություն: Սահուն, արդյունավետ և երկարակյաց հզորության փոխանցում ապահովելու դրանց ունակությունը դրանք դարձրել է ժամանակակից փոխանցման համակարգերի անփոխարինելի բաղադրիչ: Անկախ նրանից, թե դրանք օգտագործվում են ավտոմոբիլային, արդյունաբերական, թե ավիատիեզերական ոլորտներում, այս ատամնանիվները շարունակում են սահմանել շարժման և մեխանիկական կատարողականության գերազանցությունը:
Հրապարակման ժամանակը. Հոկտեմբերի 24-2025